在上篇文章中我们介绍了Lazy Theta*。本篇中我会演示一下我实现的Lazy Theta*。
先上代码
//在一个点被expand时是否调用DebugOnExpanded事件,用于debug查看expand的范围。#define _PATHDEBUGEVENT_using System;using System.Collections;using System.Collections.Generic;using UnityEngine;using System.Linq;using C5;namespace CSPathFinding { public interface IPFVertex where T:IPFVertex , IEquatable { /// /// 检查视线 /// /// 另一点 /// 能否看到另一点 bool CheckLOS(T other); /// /// 该点到另一点的消耗 /// /// 另一点 /// /// 获取该点的邻居 /// /// 邻居列表 IEnumerable Neighbours(); } public static class BasicPathFind where T : IPFVertex , IEquatable { public class PathFinder { public int maxIterations = 200; public float heuristicWeight = 1.5f; struct _HPacker :IComparable<_HPacker>{ public _HPacker(T val,float gph) { value = val; this.GPH = gph; } public T value; public float GPH; public int CompareTo(_HPacker other) { if (GPH < other.GPH) { return -1; } if (GPH > other.GPH) return 1; return 0; } } //priority queue from C5. IntervalHeap<_HPacker> open = new IntervalHeap<_HPacker>(); System.Collections.Generic.HashSet close = new System.Collections.Generic.HashSet (); Dictionary parent = new Dictionary (); Dictionary g = new Dictionary (); public T start { get; private set; } public T end{ get; private set; } int iteration = 0; public PathFinder(T start,T end,float heuristicWeight = 1.0f,int maxIterations = 200) { this.start = start; this.end = end; this.heuristicWeight = heuristicWeight; this.maxIterations = maxIterations; parent[start] = start; g[start] = 0; open.Add(new _HPacker(start, g[start] + this.heuristicWeight * start.Cost(end))); } public event Action DebugOnExpanded; //the code here is basicly a translation of psuedo-code from http://aigamedev.com/wp-content/blogs.dir/5/files/2013/07/fig53-full.png private bool InternalIterate() { if (open.Count == 0) return true; var s = open.FindMin().value; open.DeleteMin();#if _PATHDEBUGEVENT_ if (DebugOnExpanded != null) DebugOnExpanded(s);#endif if (close.Contains(s)) return false; SetVertex(s); close.Add(s); if (iteration++ > maxIterations || s.Equals(end)) { return true; } foreach (var sp in s.Neighbours()) { if (!close.Contains(sp)) { if (!g.ContainsKey(sp)) { g[sp] = Mathf.Infinity; parent.Remove(sp); } UpdateVertex(s, sp); } } return false; } public IEnumerable QuickFind() { while (!InternalIterate()) ; List res = new List (); var temp = close .OrderBy( v => v.Cost(end)) .FirstOrDefault(); if (temp == null) return null; while (!parent[temp].Equals(temp)) { res.Add(temp); temp = parent[temp]; } res.Reverse(); return res; } void UpdateVertex(T s,T sp) { var gold = g[sp]; ComputeCost(s, sp); if (g[sp] < gold) { open.Add(new _HPacker(sp,g[sp]+ heuristicWeight * sp.Cost(end))); } } void ComputeCost(T s,T sp) { if (g[parent[s]] + parent[s].Cost(sp) < g[sp]) { parent[sp] = parent[s]; g[sp] = g[parent[s]] + parent[s].Cost(sp); } } void SetVertex(T s) { if (!parent[s].CheckLOS(s)) { var temp = s .Neighbours() .Intersect(close) .Select(sp => new { sp = sp, gpc = g[sp] + sp.Cost(s) }) .OrderBy(sppair => sppair.gpc) .FirstOrDefault(); if (temp == null) return; parent[s] = temp.sp; g[s] = temp.gpc; ; } } } public static PathFinder FindPath(T start, T end) { return new PathFinder(start, end); } }} 为了泛用性考虑,我使用了一个接口代表寻路模型中的节点。寻路时传入两个继承该接口的节点即可。如果寻路的节点时是临时生成的(在获取邻点的时候直接new出来的),那么应该实现自己的IEquatable方法来保证相等。
对自己的寻路模型实现IPFVertex后,调用BasicPathFinder.FindPath(s,e)得到一个PathFinder,然后调用PathFinder.QuickFind(),即可返回一个IPFVertex的IEnuemerable,表示路径。
主体代码基本上是上一篇中伪代码的直接翻译。但是我把循环打开节点放在了单独的方法中,这样以后可以修改成不要求单帧内完成的寻路。
- IntervalHeap来自一个github上的集合库C5(),功能类似c++中的priority queue,可以加速在open里查询最优先点的过程。需要注意的是这里不能用sortedList,因为sortedList按键值存储,重复的键会抛出异常。如果不用C5的话直接换成List也可以。
- close用了HashSet,因为只需要做求交、插入两种操作。
- parent用的是Dictionary,最快的实现应该是用数组表示,但是要求节点能够返回一个唯一表示自己的正数,太麻烦了。
- g用的Dictionary,理由同上。
原文中的UpdateVertex中做的操作是查询open里是否存在sp,存在则先移除,这是防止一个节点被多次expand。我的实现里去掉了这一行,相应的在expand节点时检测该节点是否已经被close。这是考虑到PriorityQueue的检测元素的效率较低。同时考虑到:一个节点多个存在于PriorityQueue中的话,只有优先值最低的那个会先出来,被expand。而被expand之后,就会被加入到close表里去。对于之后的多个相同节点,我们只需检测是否在close里就可以知道它们是不是被expand过了。
需要注意的是在许多讨论A*的文章中这一步的具体实现都是略过的,主要是同时支持优先级、调整优先级、检测存在这三个特性并且时间复杂度过得去的容器根本不存在,上面我提到的就是一种workaround,我之前刷题写的A*都是用的这种workaround,可以保证正确性。
加入了一个maxIteration的设置,因为如果目标点不可达,而不停止的话,最终所有可达的点都会被expand一遍,然后cpu就炸了。不过如果有一个点可达但只是路程太绕的话,这个设置可能会导致一直撞墙,还是需要自己取舍。
在到达maxiteration或者到达终点之后,会在所有close的点里找一个和终点最接近的。这样就算目标点在墙里,也会走到离目标点最近的地方,而不是原地不动,更加合理。同时如果太远的话,也可以分段寻路。
下面是一些演示:
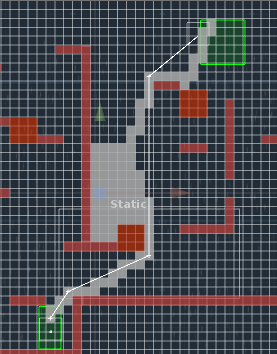
右上角绿色是起点,左下角绿色是终点。
白色块的是进入过open的节点。 白线是最终的路径。HeuristicWeight = 1.0f时(超过MaxIteration了,直接返回了中间的路径。)
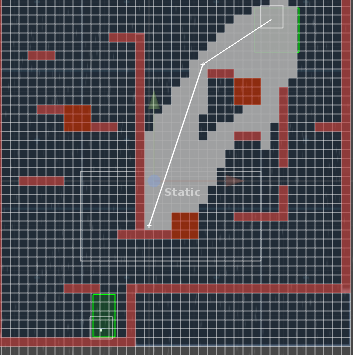
HeuristicWeight = 1.5f时